
90×81cm 30kgの階段走行ロボットを作ってみた! 2本のサブクローラーで本体を持ち上げ段差を突破
今回紹介するのは、PROJECT SR 311さんが投稿した『【PROJECT SR】NUEMK-2 PV』という動画です。
投稿者メッセージ(動画説明文より)
今回は,階段走行用クローラロボットを作成しました.
この動画はプロモーションビデオ風の動画です.
構成解説編は現在作成中なので,ご期待ください.
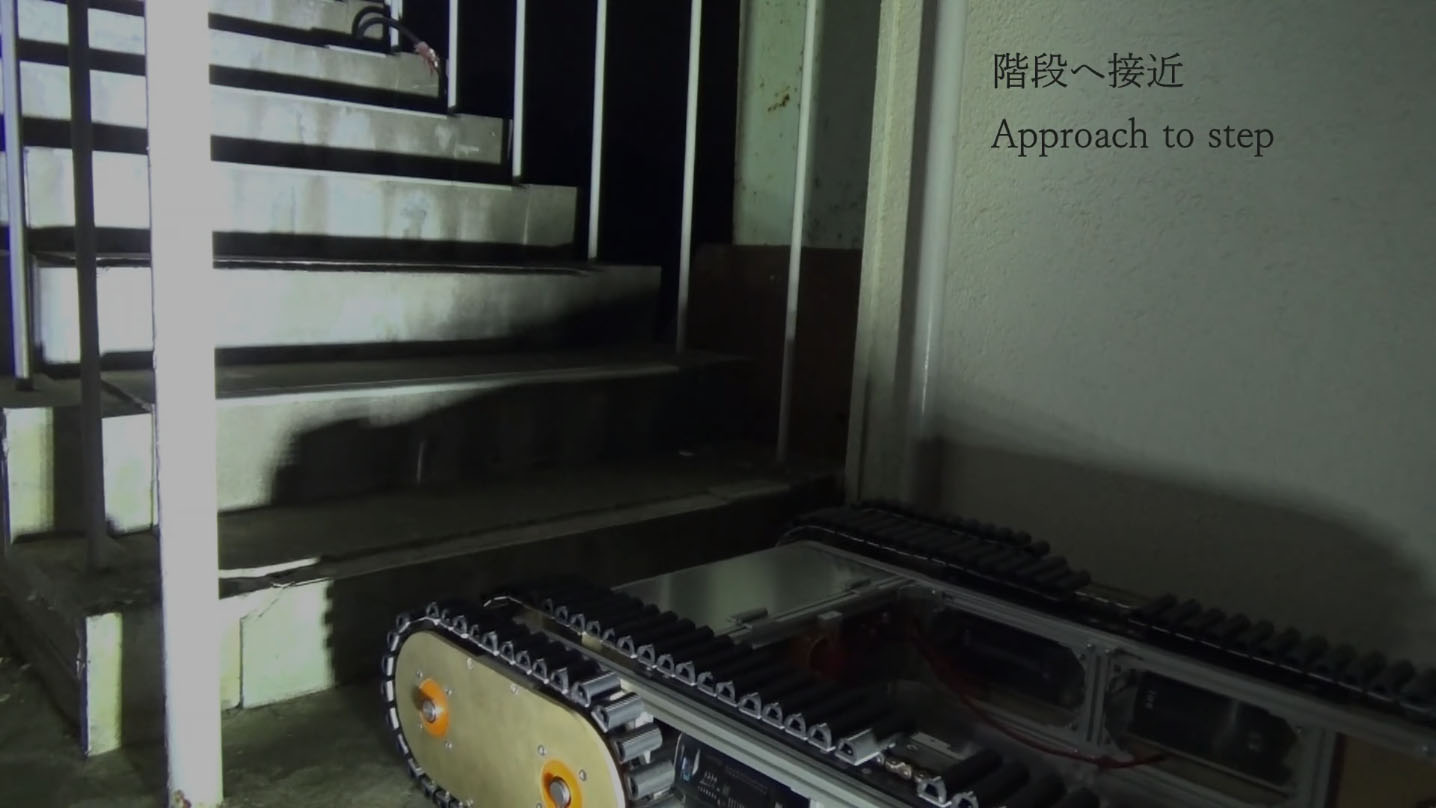
PROJECT SR 311さんが階段をのぼるロボットを製作しました。突破力がすごそうです。

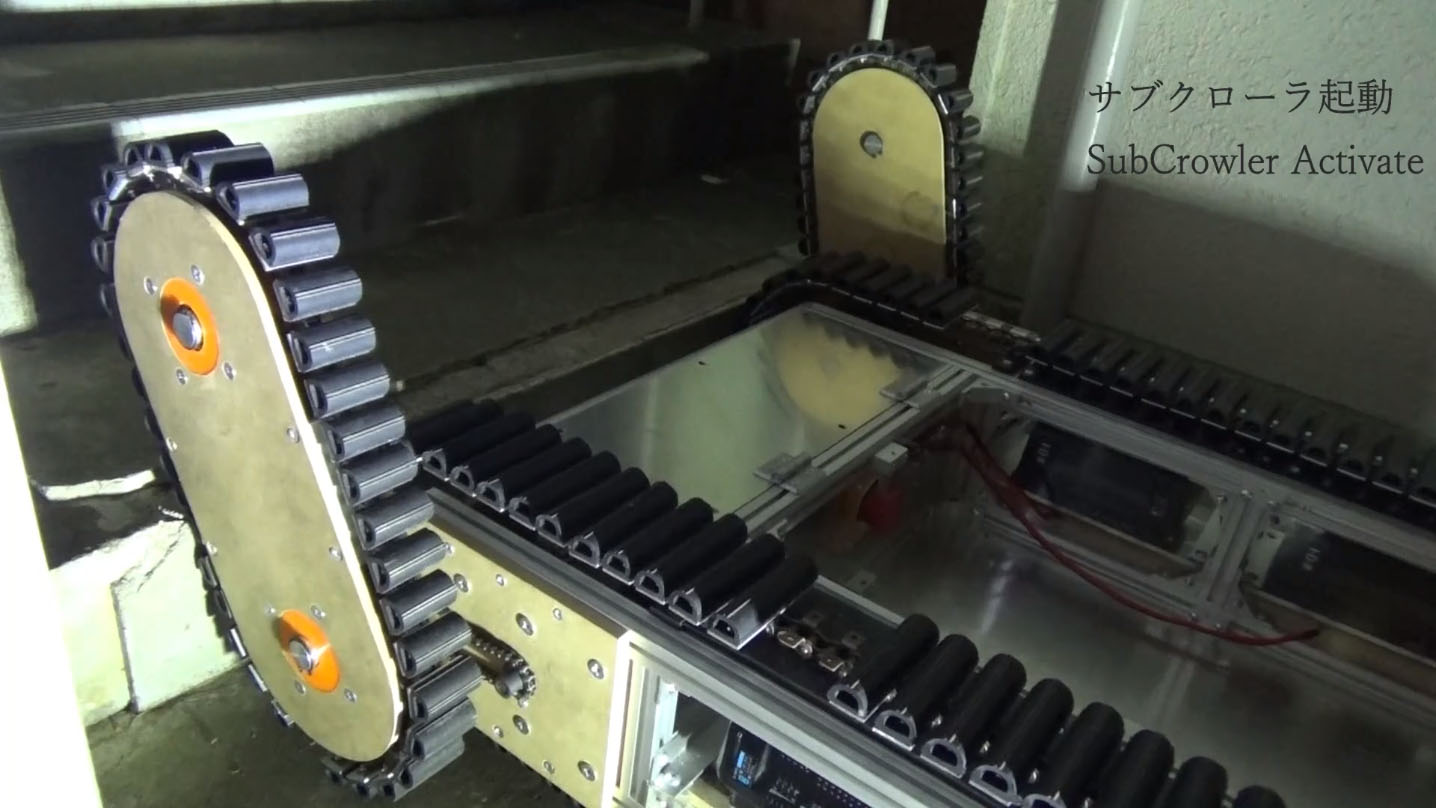
戦車でおなじみのクローラー(履帯)。これが二重になっているのが特徴です。階段の下に到達したら、小さな履帯“サブクローラー”を肩を回すように回転させ段に乗せます。
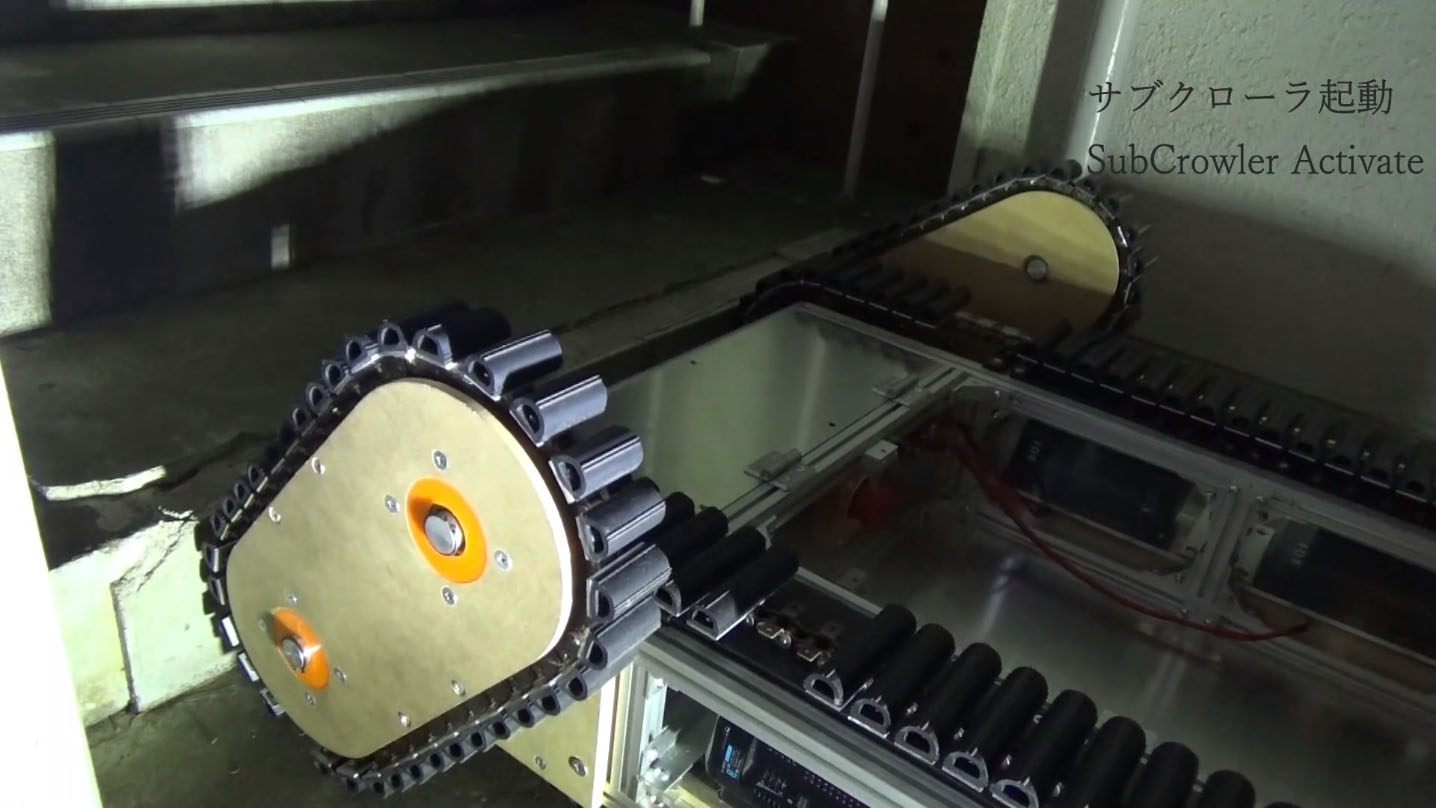
アームの力で、本体前方が持ち上がります。

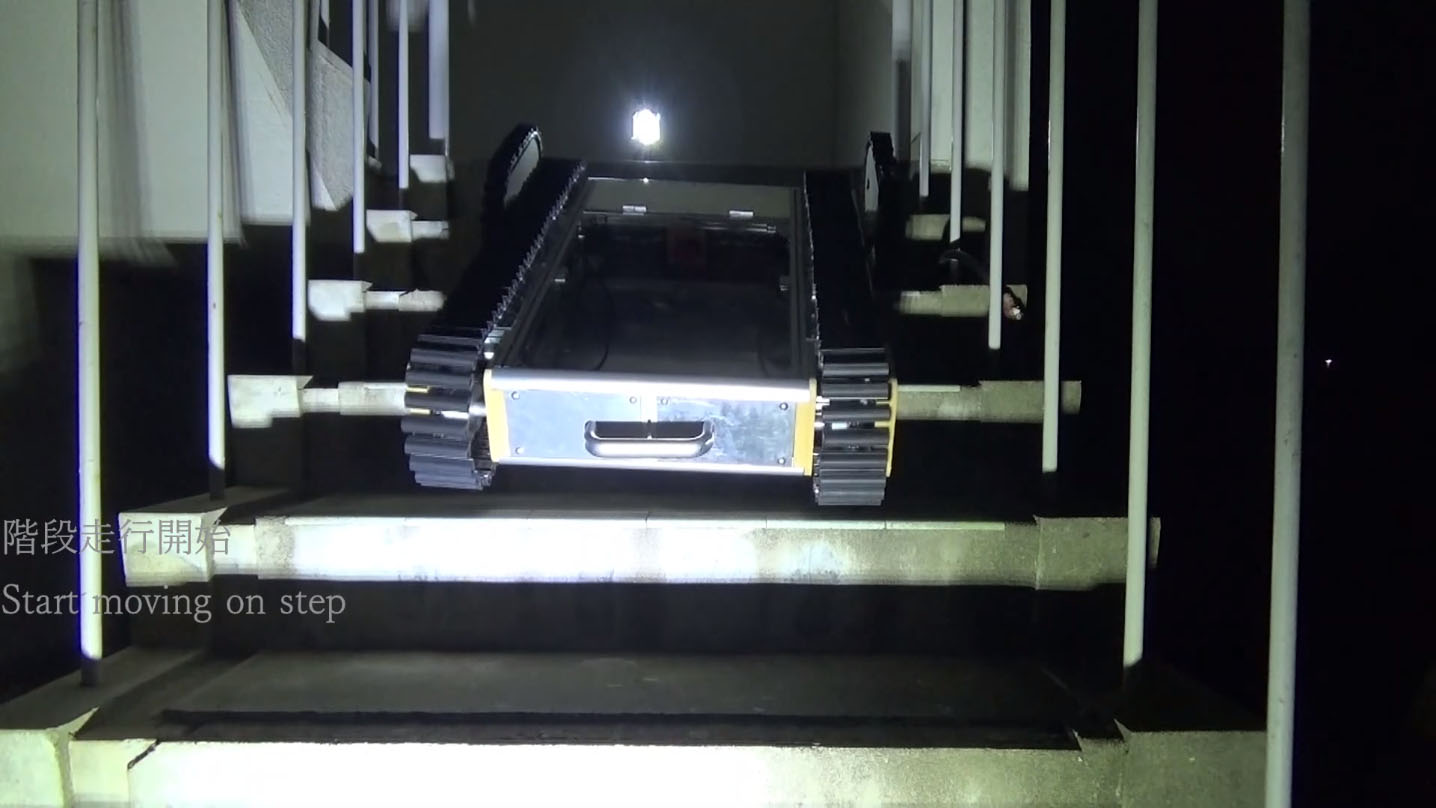
本体のクローラーにより階段をのぼります。

踊り場に着いたらアームを下げます。ショックを和らげることができます。


大きさは幅810ミリ、長さ900ミリ、高さ120ミリで、重量30キロとかなりガッチリしています。速度調整や旋回もできるそうです。
文/高橋ホイコ