
サーキットを用意できない方に朗報!? 『ミニ四駆』を赤外線誘導で自動走行させてみた!
今回紹介するのは、近未来技術研究室さん投稿の『赤外線誘導の自動走行ミニ四駆』という動画です。
投稿者メッセージ(動画説明文より)
ミニ四駆を改造して自動走行できるようにしました
赤外線誘導方式の自動走行です
タミヤより発売されているモーターを搭載した四輪駆動の模型『ミニ四駆』。様々な改造を施して、より自分の望む速さやデザインを追い求めたりと大人から子供まで楽しめる自動車模型です。
そんなミニ四駆ですが、一つ重大な問題が存在します。

サーキットが大きい
昨今とある界隈では有名な「ジャパンカップ ジュニアサーキット」が存在しますが、こちらは場所を取ってしまう問題点があります。また、どこか場所を借りたとしてもサーキット事態を運ぶのは大変です。

そういった経緯で発生したサーキット問題。こちらを解決するために近未来技術研究室さんがとある秘策を思いつきました。
それが自動走行です。
自動走行が可能となれば、人々はサーキットから解放されるはずです。
そんな素晴らしいアイデアを実現するために、要素をまとめます。
・できるだけ少ない部品と設備で
・可能な限り安価に作れること
・複数のミニ四駆が同時に走行可能
・競争(レース)ができる追い抜きが出来ること
・楽しく遊べること
上記の5項目を上手く満たしたミニ四駆を模索した結果、「赤外線誘導式の自動走行システム」を考案した近未来技術研究室さん。
赤外線誘導式の自動走行システムでは、点(ポイント)誘導による周回走行となります。

ミニ四駆を含め、既存の自動走行システムの多くは線(ライン)をガイドにして走行しています。
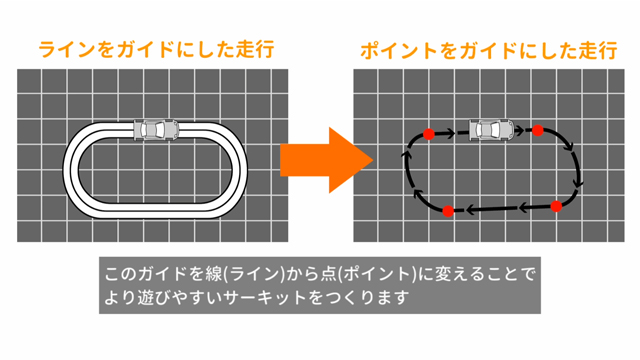
このガイドを線(ライン)から点(ポイント)に変えることでより遊びやすいサーキットを作ります。これによって従来の固定式から可変が可能となります。
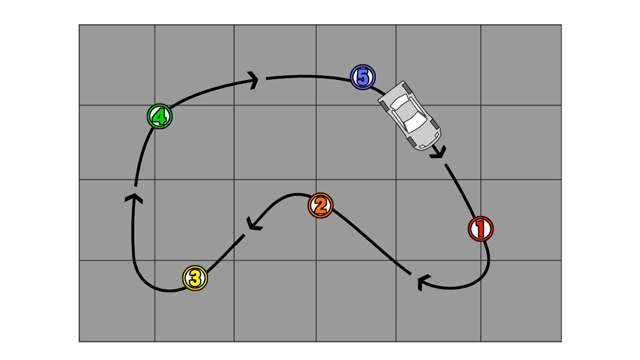
目標となるポイントを複数設置します。これらの各目標は個別の信号を発信しています。ミニ四駆はプログラムされた順番に目標を通過し周回走行します。
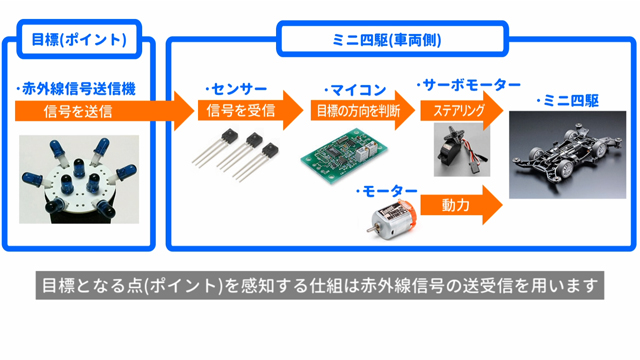
先ほどの目標となる点(ポイント)を感知する仕組みに赤外線信号の送受信を用いるという形です。ミニ四駆のセンサーが信号を受信してマイコンで目標の方向を判断する仕組みです。

今回使用するマイコンやステアリング機構、サーボモーターなど必要な部品を集めます。
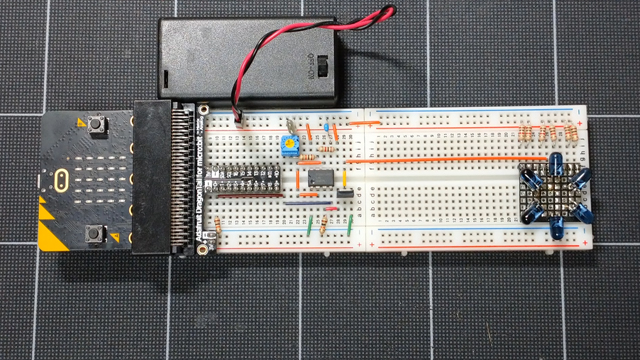
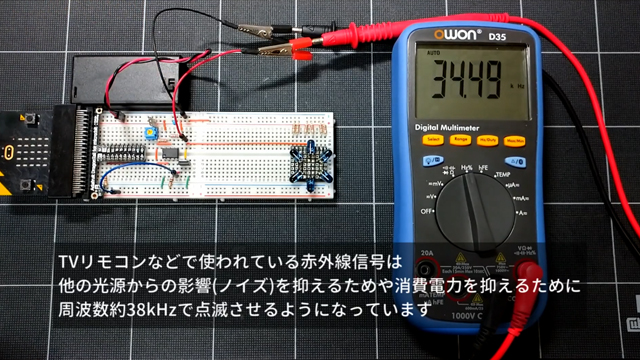
初めに赤外線送信機を作ります。TVリモコンなどで使われている赤外線信号は他の光源からの影響(ノイズ)を抑えるためや消費電力を抑えるために周波数約38kHzで点滅させるようになっています。
そのため、調整して赤外線LEDを周波数38kHzで点滅させます。
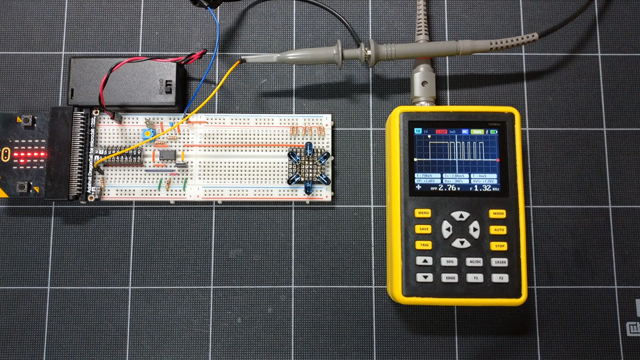
38kHzで点滅させた赤外線LEDにマイコンMicrobitで作った信号波形を乗せたら完成です。
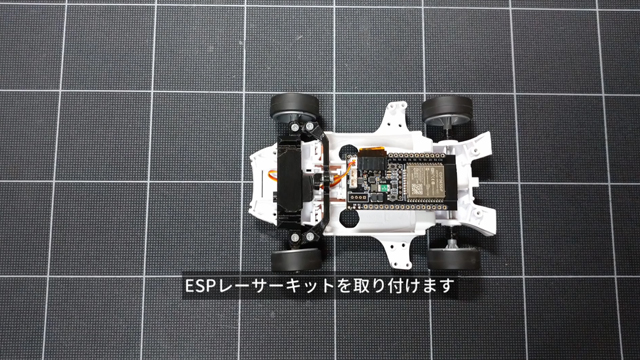
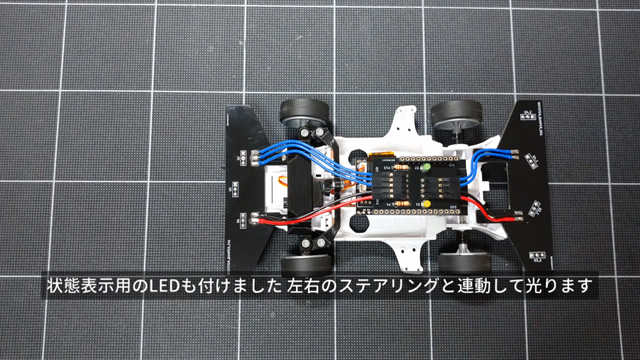
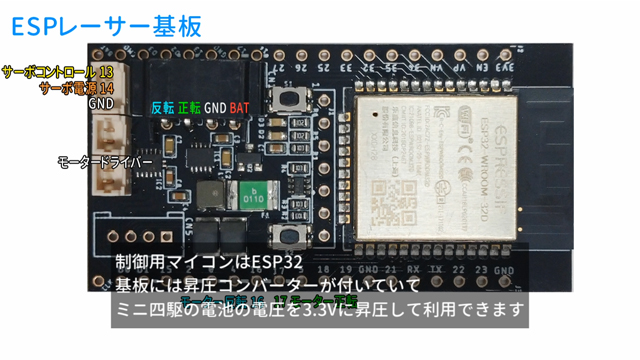
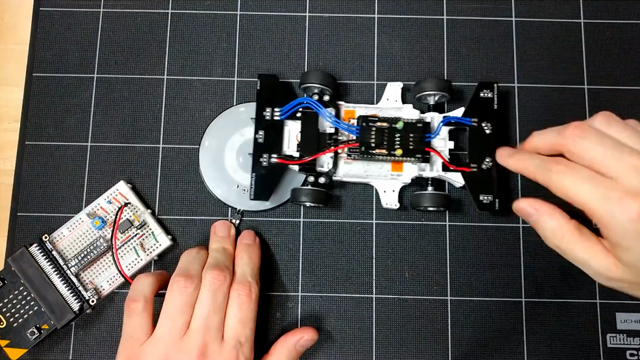
次はミニ四駆を作ります。まずミニ四駆のシャーシの前後のバンパーを切り落とします。その後、ESPレーサーキット、バンパー基盤などを取り付けます。バンパー基盤は目標の方向を感知するためのセンサーとして使います。
ミニ四駆を作り終えたら、ESPレーサー基盤のプログラムを書き換えます。
ちなみにESPレーサー基盤のプログラムを上書きする形になるため、書き換えたら元に戻せないそうです。
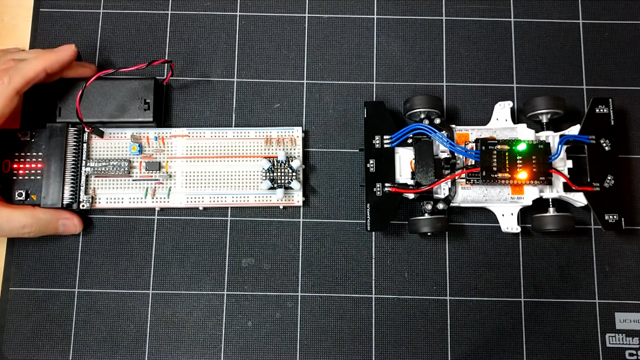
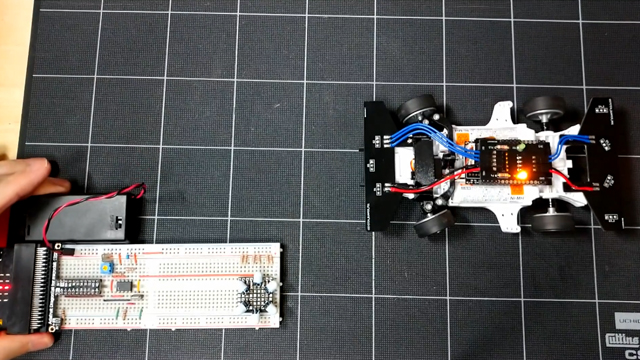
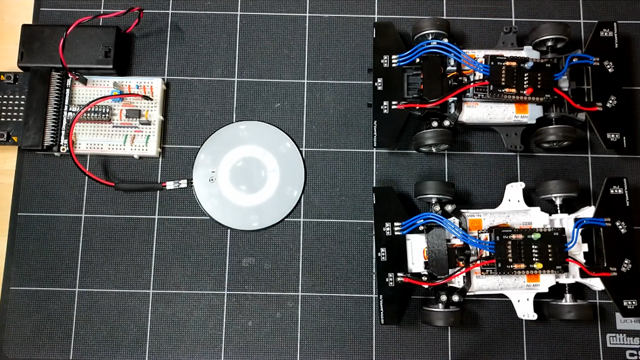
完成したので動きを確認します。
スイッチをON。手に持っているLEDを前後に動かして、ミニ四駆のタイヤが装置の方向に動いたら成功です。はたして、無事成功するののか……。
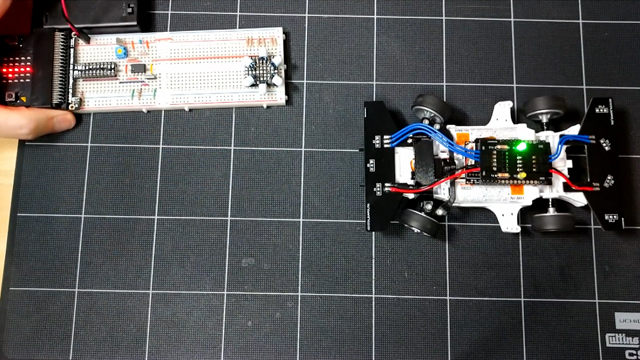
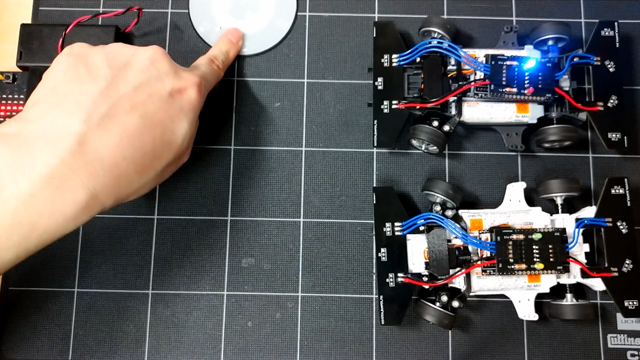
無事成功しました!
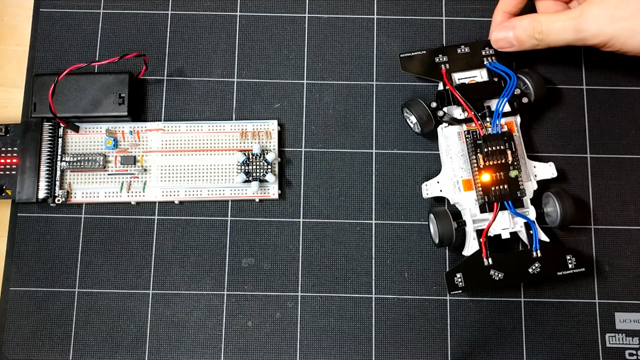
しかし、1つ問題点が発生しました。
このままではLEDにミニ四駆が衝突してしまいます。なので、LEDを薄くします。
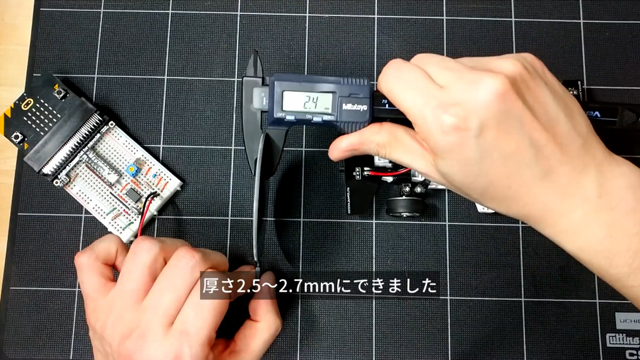
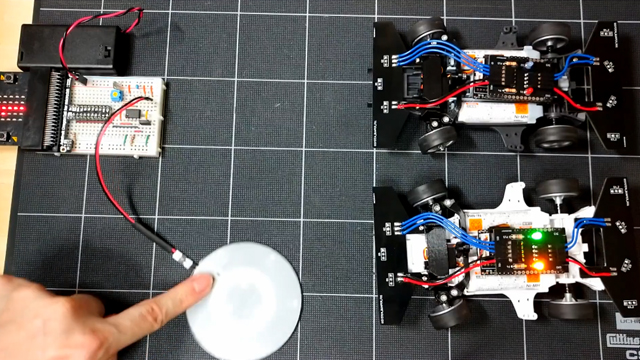
それがコチラ。厚さは驚きの2.5~2.7mm。
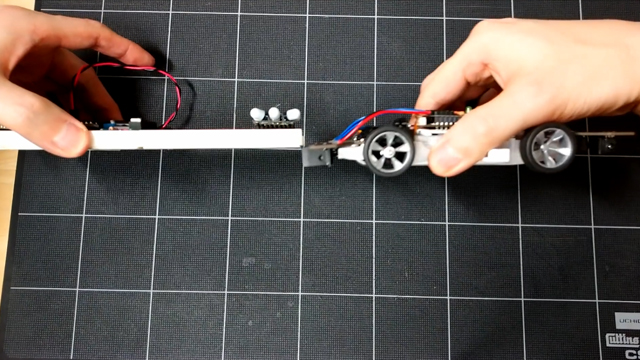
ミニ四駆がなんなくLEDの上を通過しています。
今回、複数のミニ四駆が同時に走行と競争させるためにミニ四駆をもう1台用意しました。
コチラも問題なく動きました。
このミニ四駆を使って走行テストを行ないます。

用意しているポイントは5個。これらのポイントを上手く走行出来たら成功です。
ミニ四駆が走り出し、左上のポイントに向かいます。

ポイントを通過後、左下のポイントを目指しました。

通過した後は右側のポイントに向けて舵を切っています。しっかりと自動走行しているのが分かります!

もちろん2台でも問題なく走行しています。

持ち運びや収納に関してもバッチリ考えています。作成した自動走行ミニ四駆2台とサーキットの代わりとなる赤外線送信機5個がミニ四駆の箱2個の中に収納できます。
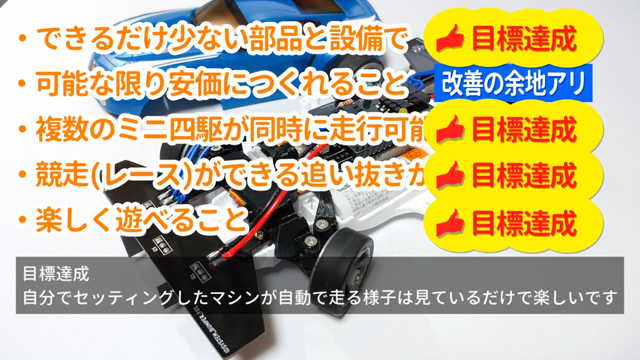
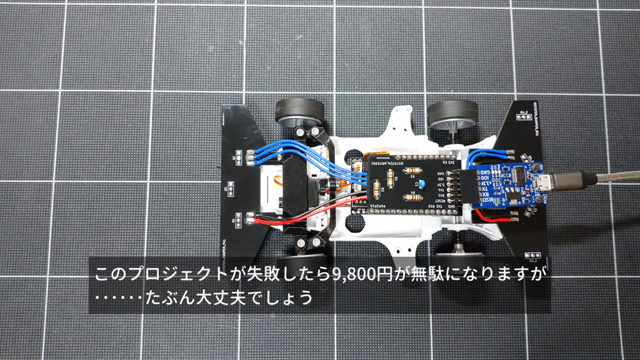
今回作成した自動走行ミニ四駆での実現したい要素をあたらめて確認します。今回は、5要素の内4つは達成できていましたが「・可能な限り安価に作れること」に関しては、比較的安価な部品で作ることが可能ですが、改善の余地ありとのこと。
今でも十分遊べるミニ四駆だと思いますので、コレさえあればいつでもどこでもミニ四駆で遊べちゃいますね!
▼動画はこちらから視聴できます▼
―あわせて読みたい―
・ミニ四駆を“500円玉サイズ”に小型化! ギヤなしで4輪駆動の限界へと挑戦してみた
・『ミニ四駆』の超軽量化を試行錯誤した結果、わずか2グラムの車体が完成! 飽くなき挑戦に「誰がここまでやれと言った」「概念が走っている…」の声