
こいつ…動くぞ! VTuber・大空スバルのマスコットキャラ「スバルドダック」を二足歩行ロボットで作ってみた
今回紹介するのは、あんぺろぼるたさん投稿の『【自作ロボット】しゅばしゅば…な二足歩行ロボを作る【大空スバル/スバルドダック/ホロライブ】』という動画です。
投稿者メッセージ(動画説明文より)
今回はホロライブ所属大空スバルさんのマスコットキャラ、スバルドダックの二足歩行ロボットを作りました!
※空は飛びません
ホロライブ所属のVTuber・大空スバルさんのマスコットキャラクター「スバルドダック」の動くロボットを、投稿者のあんぺろぼるたさんが作成します。

今回の目標はスバルドダックを二足歩行させるのが目標です。
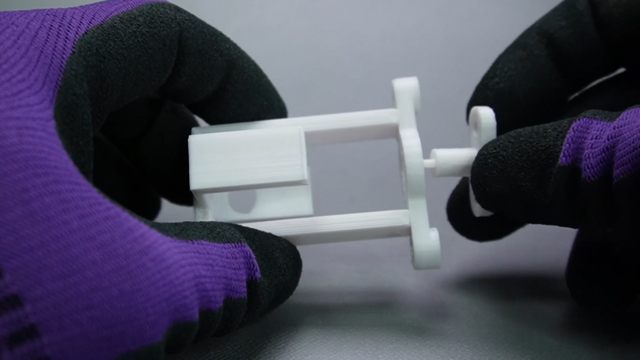
初めに稼働部を作成します。こちらの可動部は以前にあんぺろぼるたさんが作成したものを流用して作成するそうです。

それがコチラ。3つモーターを駆使して二足歩行を行ないます。

続いて、外側であるスバルドダックの本体部分を作成します。丸いオブジェクトを作り、そこから少しずつ盛り上げていき形を整えていきます。

くり抜いたり追加したりするなど、調整を行なったらスバルドダックの本体が完成しました。
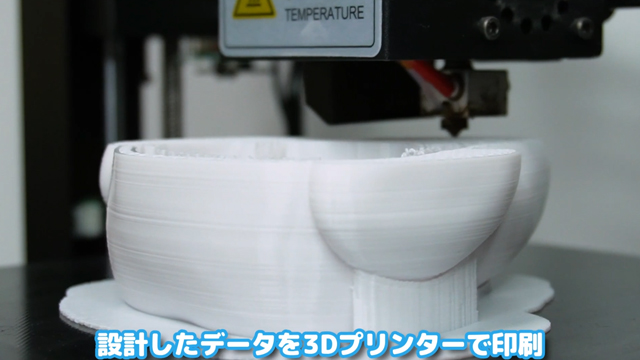
先ほど設計したデータを3Dプリンターで出力します。
出力したパーツに金具をつけたり、パーツ同士を接着するなど上手く組み立てます。



目やくちばし部分は落ちない様に裏から差し込みます。

スバルキャップもしっかり作成します。

次に可動部を作成します。各パーツを組み合わせてネジを付けます。また、どこのご家庭にもあるパイプカッターで切断したアルミパイプを使うことで、スムーズに稼働させることができます。
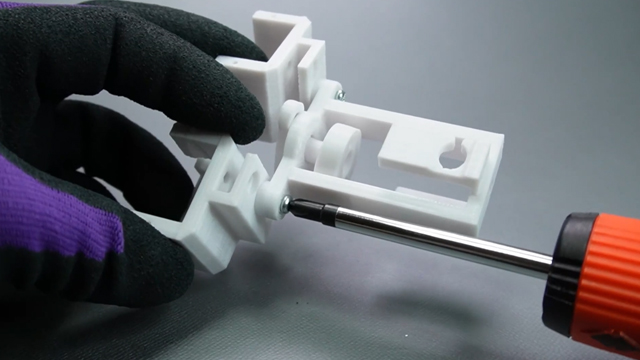

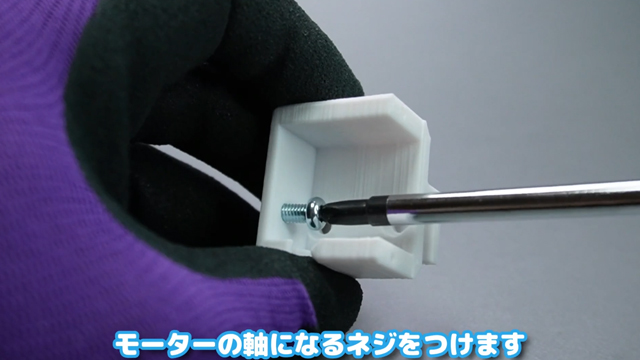
これで基本構造が完成しました。このパーツにサーボモーターを組み込みます。
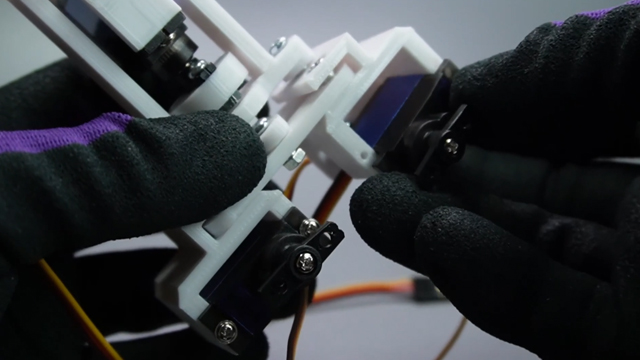

モーターを取り付けたら、軸の部分に潤滑油を塗ります。
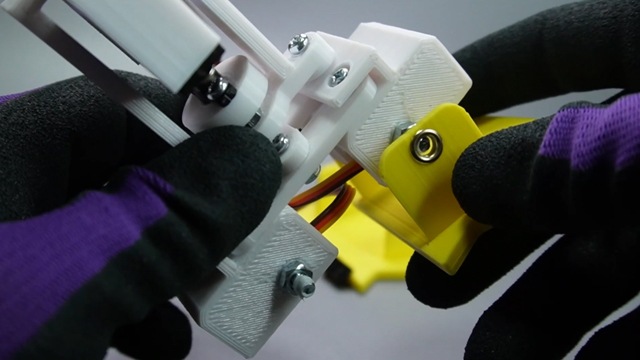
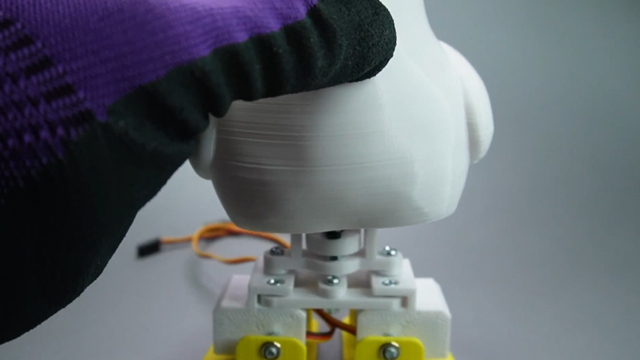
その部分に足を組み付けます。そして、ダックの部分を上部に取り付けます。

次はサーボモーターに接続する配線を作ります。コネクターを配線をはんだ付けをしてから、絶縁処理を行ないます。
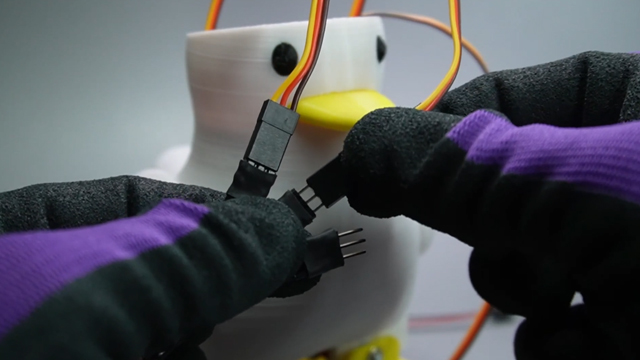

それをラズベリーパイに接続させます。

その後、「なんやかんやしてダックにキャップを被せたら完成」とのことです。



完成した姿がコチラ。まさにスバルドダック大地に立つ、といった感じでしょうか。
早速歩かせてみます。



ちょっとふらつきながらですが、無事歩行することができました。危なっかしく歩く姿もまた微笑ましいですね。スバルドダックの初歩きに動画内では「可愛い」「こいつ歩くぞ…」「シュバ シュバ 音を立てておる」といったコメントが寄せられていました。
そんな二足歩行するスバルドダックを映像で見たい方は、ぜひ動画をご視聴ください。
視聴者のコメント
本人?なんだよなぁ
本体やぞ
本人というか本鳥だな
あひるは空を飛ばんやろ
俺らも夢から覚めたらこうなってる
▼動画はこちらから視聴できます▼
『【自作ロボット】しゅばしゅば…な二足歩行ロボを作る【大空スバル/スバルドダック/ホロライブ】』
―あわせて読みたい―
・VTuberがうる・ぐらの「パーカー」を作ってみた! 染色からはじめ“手縫い”で仕上げた行動力がスゴイ
・VTuber『桐生ココ』をペーパークラフトで作ってみた 髪の毛のツヤ、衣装の質感など完成度の高さに「これが紙…!?」「マジでやば過ぎる」