
多脚戦車っぽいロボットをラズパイを駆使して作ってみた! 箱コン操作でクラッカーの発射などギミックも搭載
今回紹介するのは、作業者いっぺいさん投稿の『多脚戦車作ってみた。』という動画です。
投稿者メッセージ(動画説明文より)
RaspberryPi Zeroを使って6脚(1脚2関節)をコントロールしています。
武装として4連装クラッカーランチャーを搭載してます。
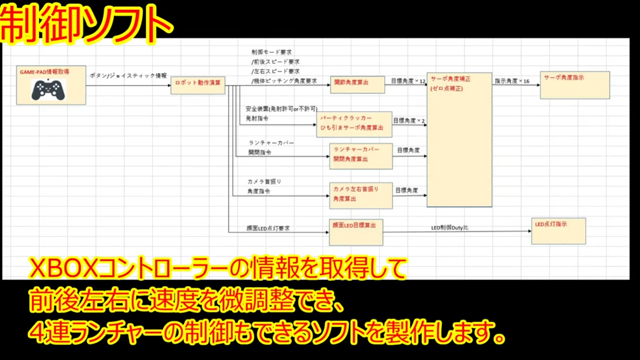
XBOXコントローラーで操作できます。
目標はタチコマなみにスムーズに動かすことが目標ですがまだまだです
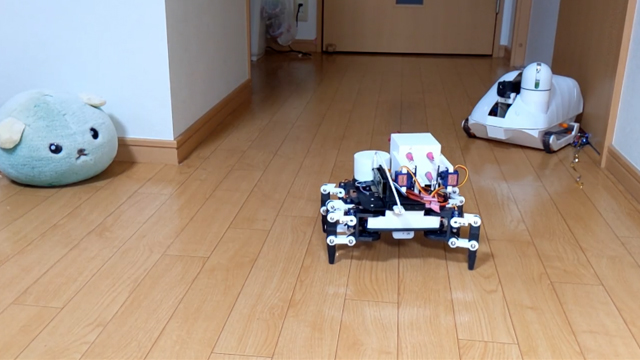
低コストかつ小型のシングルボードコンピュータの『Raspberry Pi(ラズベリーパイ)』を使って、多脚戦車っぽいロボットを作成します。

今回は、自作した多脚ロボットを改造して戦車っぽい装備を整えていきます。改造内容は
①カメラとコントローラーを追加して外部から操作できるようにする。
②戦車と名乗れるように何かを発射できるようにする。
この2点の改造を施します。
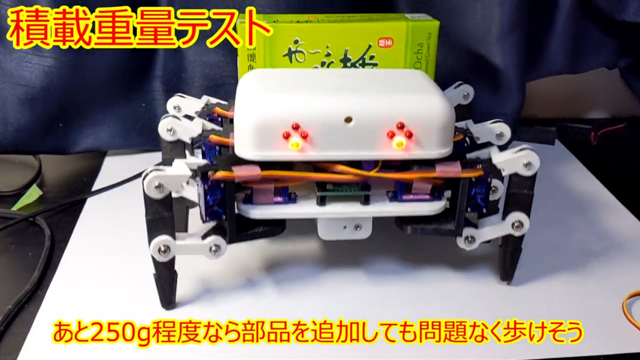
先程の改造に取り掛かる前に、ロボットに追加できる重量を確認します。250mlのお茶パックを乗せても問題なく歩行できたので、250g程度の改造を施します。
当初、発射装置に電動ガンを搭載予定でしたが重量が重くなりすぎたため中止になり、他の候補を探すことになりました。

そこで100均に面白いアイテムを探したところ、パーティクラッカーがあったのでこちらを使用することに。
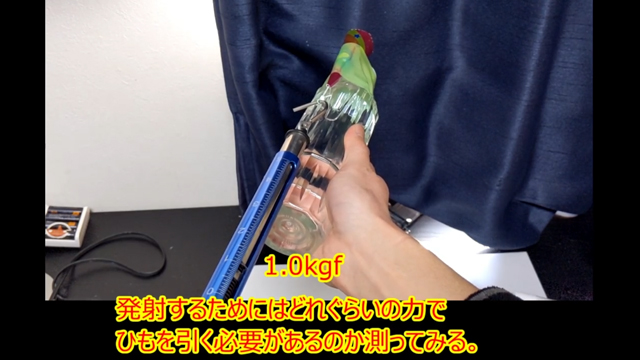
このパーティクラッカーを発射するためにはどのぐらいの力でひもを引く必要があるのか計測したところ、1.5kgfの力が必要だと分かりました。
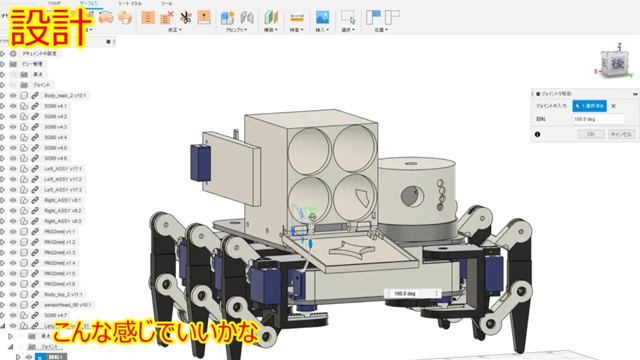
制作に必要なデータが整ったので、ソフトを使って4連ランチャーとカメラ部分のパーツをモデリングします。
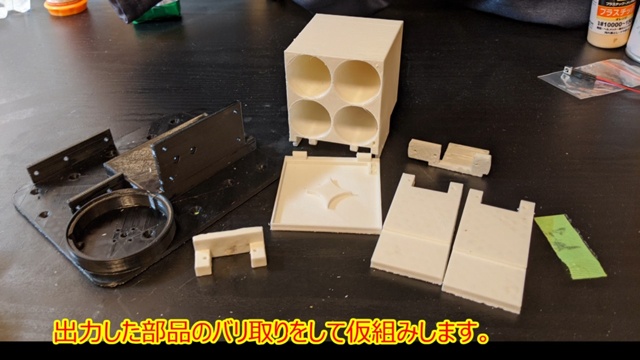
先ほどのデータを3Dプリンターで出力し、バリ取りや発射テストなど細かな調整を行ないます。
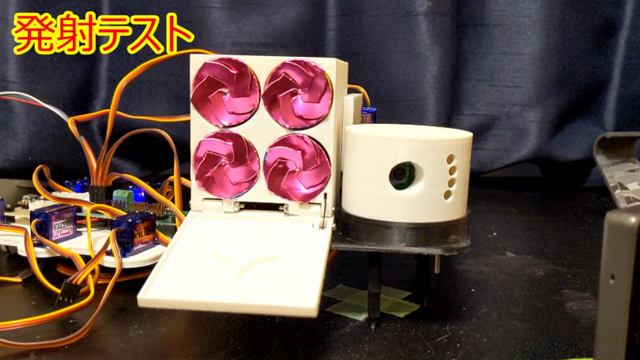
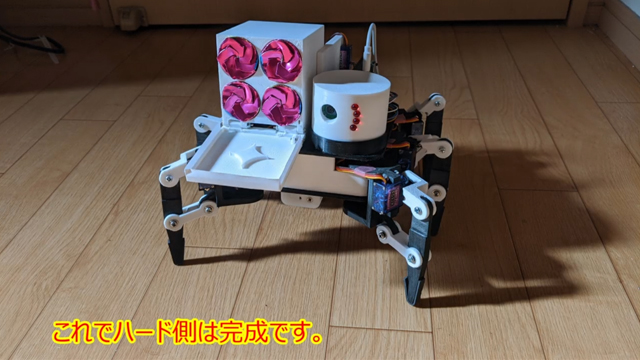
出来上がったのがコチラ。施工前と比べて物々しさが感じられる見た目となっています。
続いて、この多脚戦車を動かすために制御ソフトを作成します。
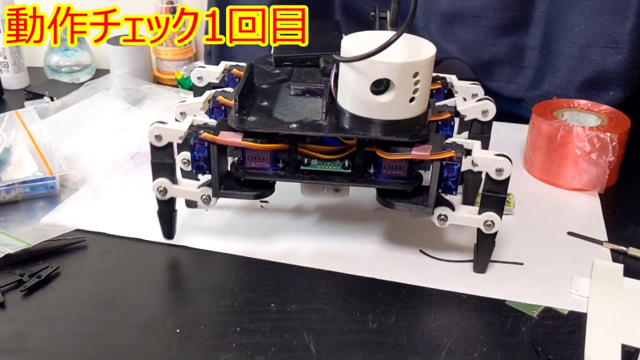
制御ソフトを作成して動作チェックを行なうと大量のバグが発生。「まるで生まれたての鹿のような動き」で大変な状態に⁉
大量のバグをガンガン修正して、なんとかまともに歩けるようになりました。

改めて実装した多脚戦車の操作方法ですが、
左スティックで前進・後退・左右旋回
右スティックでカメラの左右視点・ピッチ角度の変更
右トリガーで地上高の変更
十字キーで4連ランチャーを個別に発射
という実装となっています。

また、Raspberry Piの映像ストリーミングソフトを使って遠隔操作を実装していたのですが、映像の転送中は処理が重くなりロボットの動作がスムーズに動きませんでした。そのため、今回は諦めることになりました。
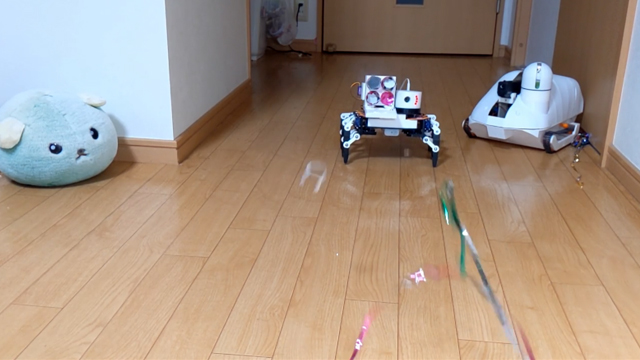
カメラの実装は見送られましたが、多脚ならではの独特な動きや4連ランチャーを発射する姿などロマンを詰め込んだようなロボットとなっています。作業者いっぺいさん曰く「処理能力が足りていなかったので、こちらの改善をしたい」とのことで目標はタチコマなみにスムーズに動かしたいとのことでした。
タチコマみたいに多彩な動きができる多脚戦車が完成したら、夢が広がりますね。そんな多脚戦車ロボットの詳しい制作過程や動く姿を見たい方は、ぜひ動画をご視聴ください!
視聴者のコメント
撃てるんか すご
うん かっこいい
KAKKEEEE!!
いいね
見ただけでわかる、これはただものじゃないと
▼動画はこちらから視聴できます▼
―あわせて読みたい―