
「ドラクエ」スライムがトランスフォーム! 二足歩行ロボになる“可変式スライム”を作ってみた
今回紹介したいのは、kotsumekaさんが投稿した『可変式スライムを作ってみた』という動画です。
投稿者メッセージ(動画説明文より)
軽い気持ちで始めたら、想像以上の難易度でした
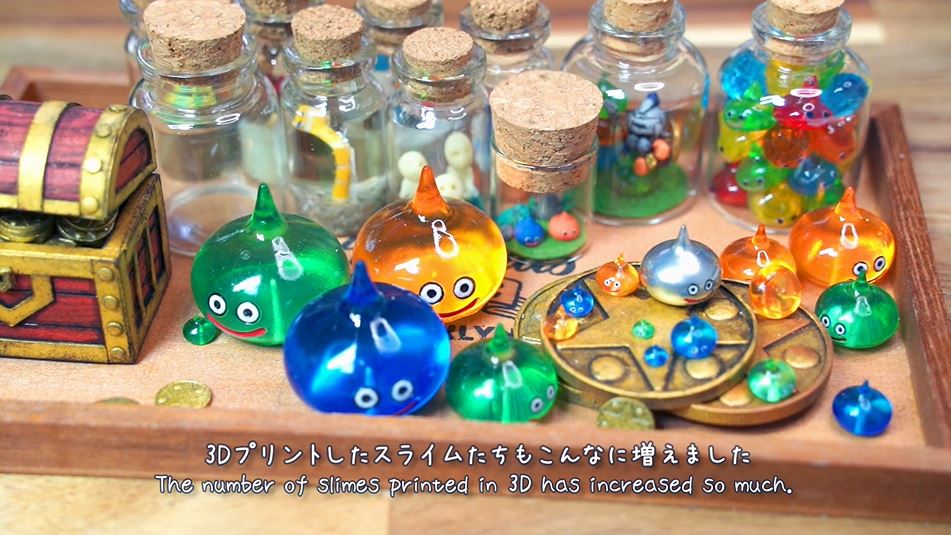
数々のスライム作品を作ってきたkotsumekaさん。
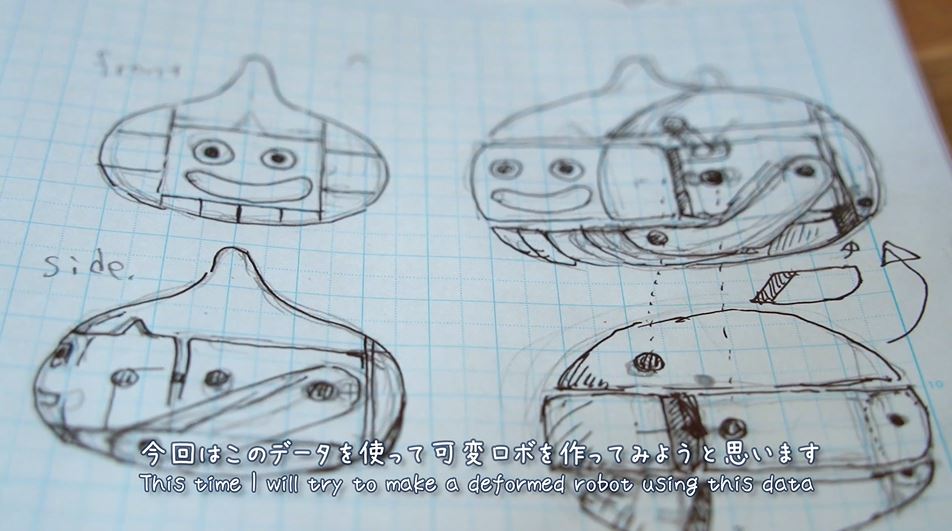
今回はスライムを可変ロボにしてみます。

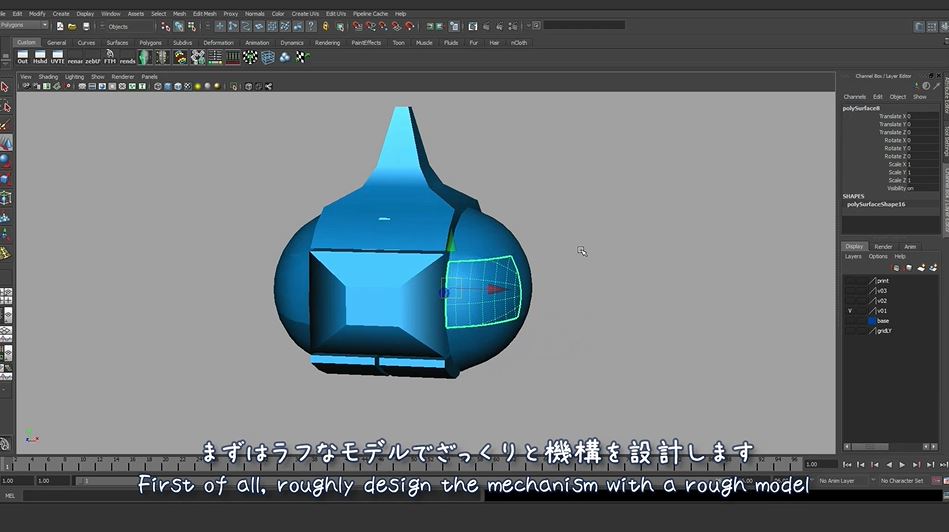

ベースのスライムのモデルから、まずはざっくりと機構を設計。
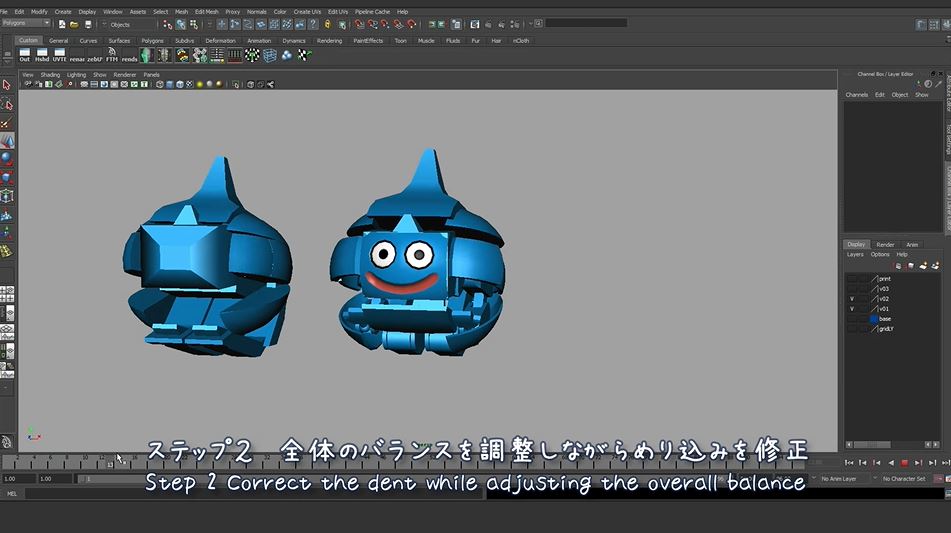
全体のバランスを調整しながら、スライムらしい形状にしていきます。
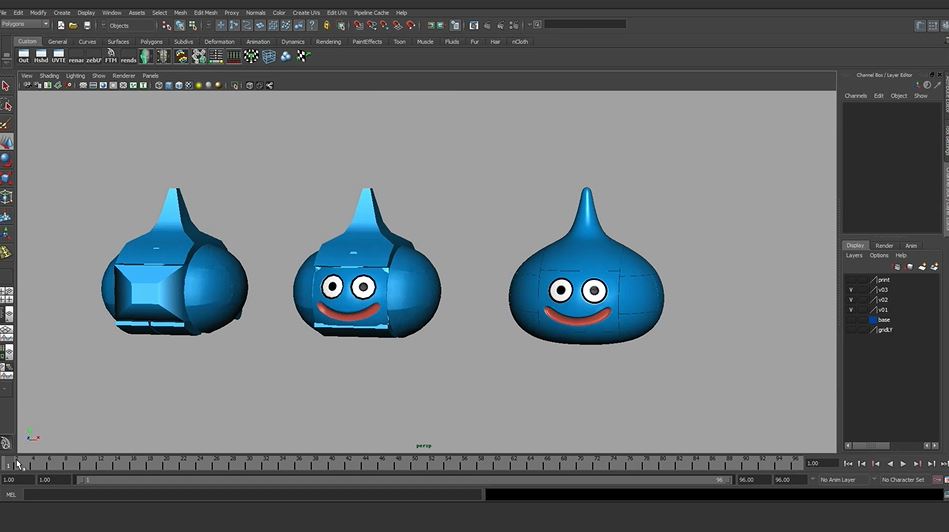

関節部分にビス用の穴を追加するなどの修正を加え、3Dモデルが出来ました。

水洗いレジンのクリアブルーで3Dプリント。
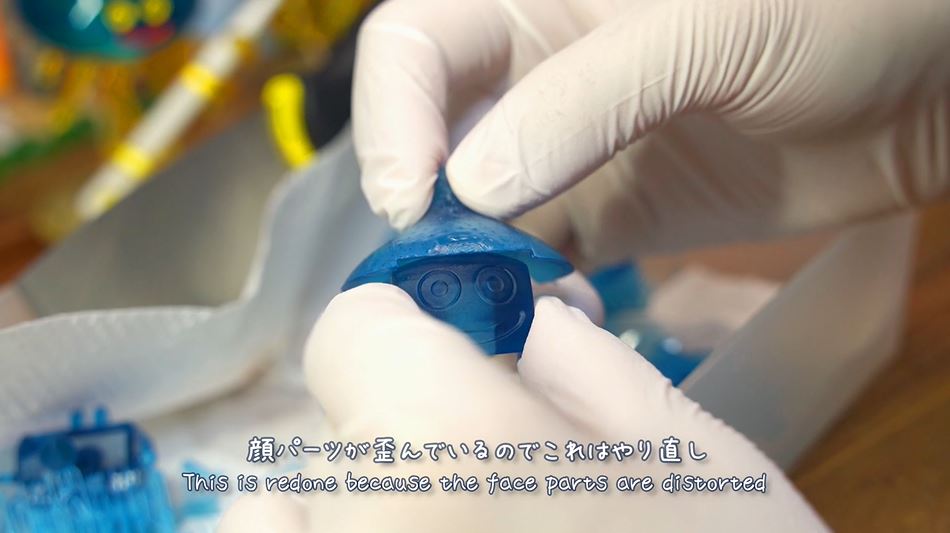


歪んでいたパーツは、サポートを追加したりパーツを分割するなどして再プリントしました。
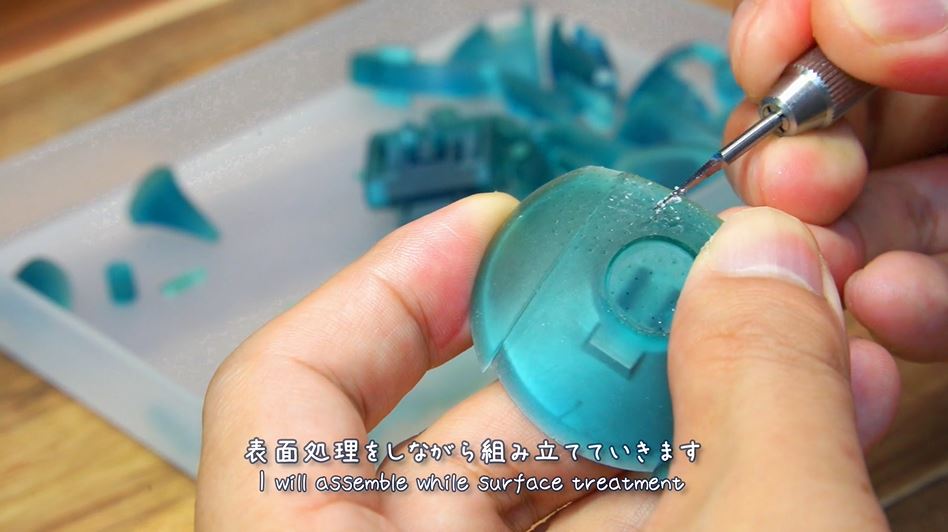


二次硬化したら表面処理をして組み立てます。

目と口を塗装して……

組み立て完了です。

いよいよトランスフォーム。まずは足を引き出します。

ここ、ちょっとスラッピー。

そして変形完了! 二足歩行のロボットへと変貌を遂げました。
モデリングだけで20時間かかったという可変式のスライム。完成作品や制作過程の詳細に興味を持たれた方は、ぜひ動画をご視聴ください。
視聴者のコメント
・おや、スライムのようすが・・・?
・すげえなこりゃ
・大変だぁ…
・案外小型だ、すごい
・かわいい
▼動画はこちらから視聴できます▼
―あわせて読みたい―